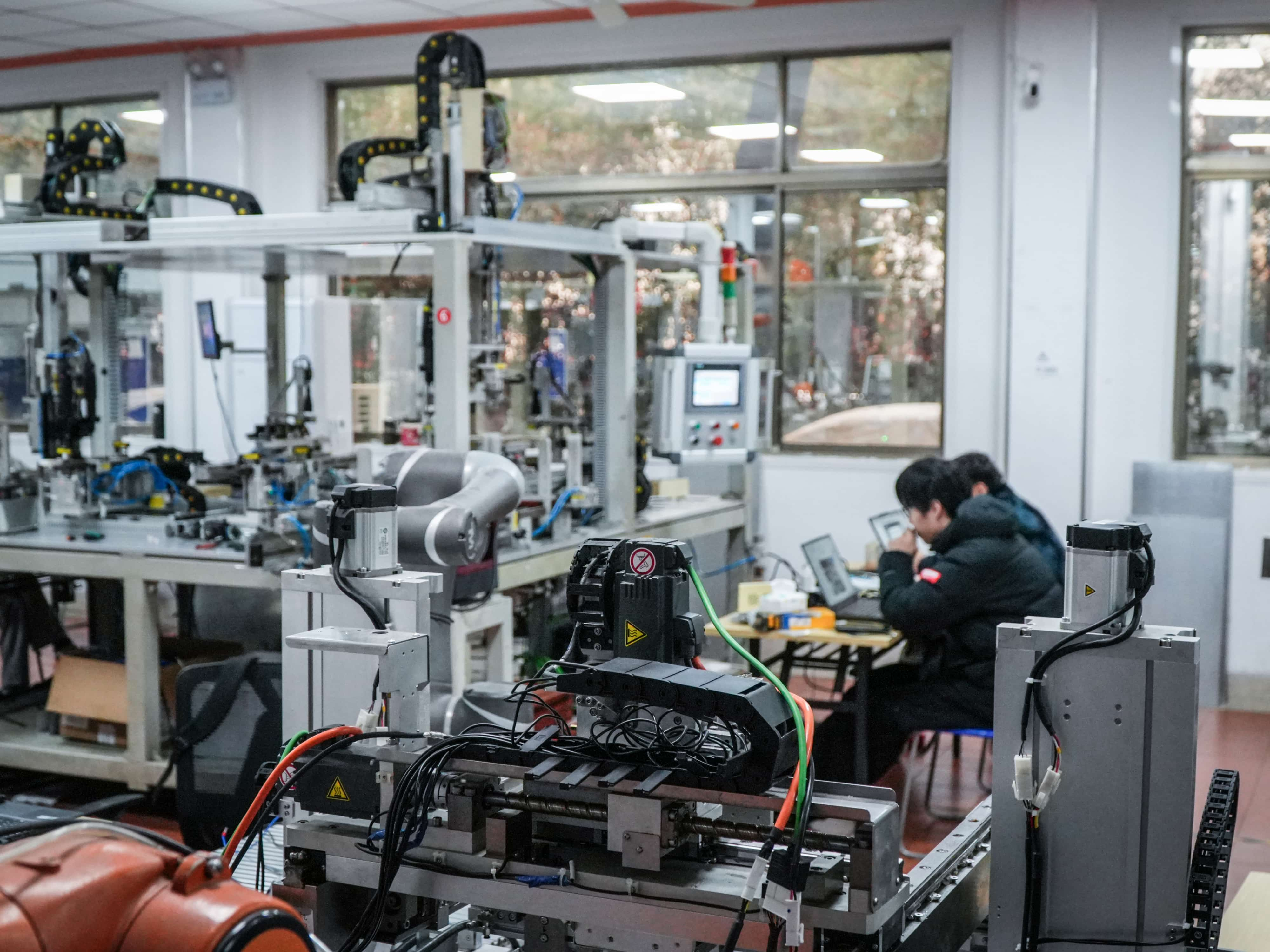
随着全球制造业向智能化、柔性化转型,工业机器人作为核心装备,其应用深度与广度不断拓展。然而,传统工业机器人在实际部署中仍面临诸多挑战,例如编程复杂、调试周期长、对操作人员技能要求高等。为了充分发挥工业机器人在我国制造业转型升级中的核心地位,除了加快发展工业机器人产业本身,重点研发工业机器人的运用技术显得尤为迫切。这些技术的主要目的是增强工业机器人的感知适应能力、降低用户使用难度、缩短示教与编程时间、提高运动精度以及拓宽应用范围。
在众多运用技术中,直觉示教与快捷编程技术被视为提升机器人易用性的关键。传统的工业机器人编程方式主要分为离线编程和在线编程两种。离线编程是基于工件的三维数字模型生成机器人的运动轨迹和控制程序,具有编程效率高的优点,且无需占用实际生产线时间。但在面对小批量、多品种的柔性生产需求时,离线编程的灵活性和响应速度往往显得不足。在线编程,尤其是“示教再现”模式,虽然直观,但通常需要操作人员手持示教器,逐点记录机器人末端的位置和姿态,过程繁琐且易出错,对操作人员的专业素养要求极高。
直觉示教技术的出现,旨在打破这一瓶颈。该技术允许操作人员通过更自然的方式与机器人互动,例如直接拖拽机器人的手臂进行示范,或者利用视觉、语音等交互手段。当操作人员拖动机器人末端到达指定位置时,机器人的控制系统能实时记录下各个关节的角度或末端执行器的位姿,并自动生成平滑的运动轨迹。这种方式极大地降低了编程门槛,使得没有深厚编程背景的一线工人也能快速部署机器人任务。此外,结合增强现实(AR)或虚拟现实(VR)技术,工程师可以在虚拟环境中进行直观的路径规划和碰撞检测,进一步缩短现场调试时间。
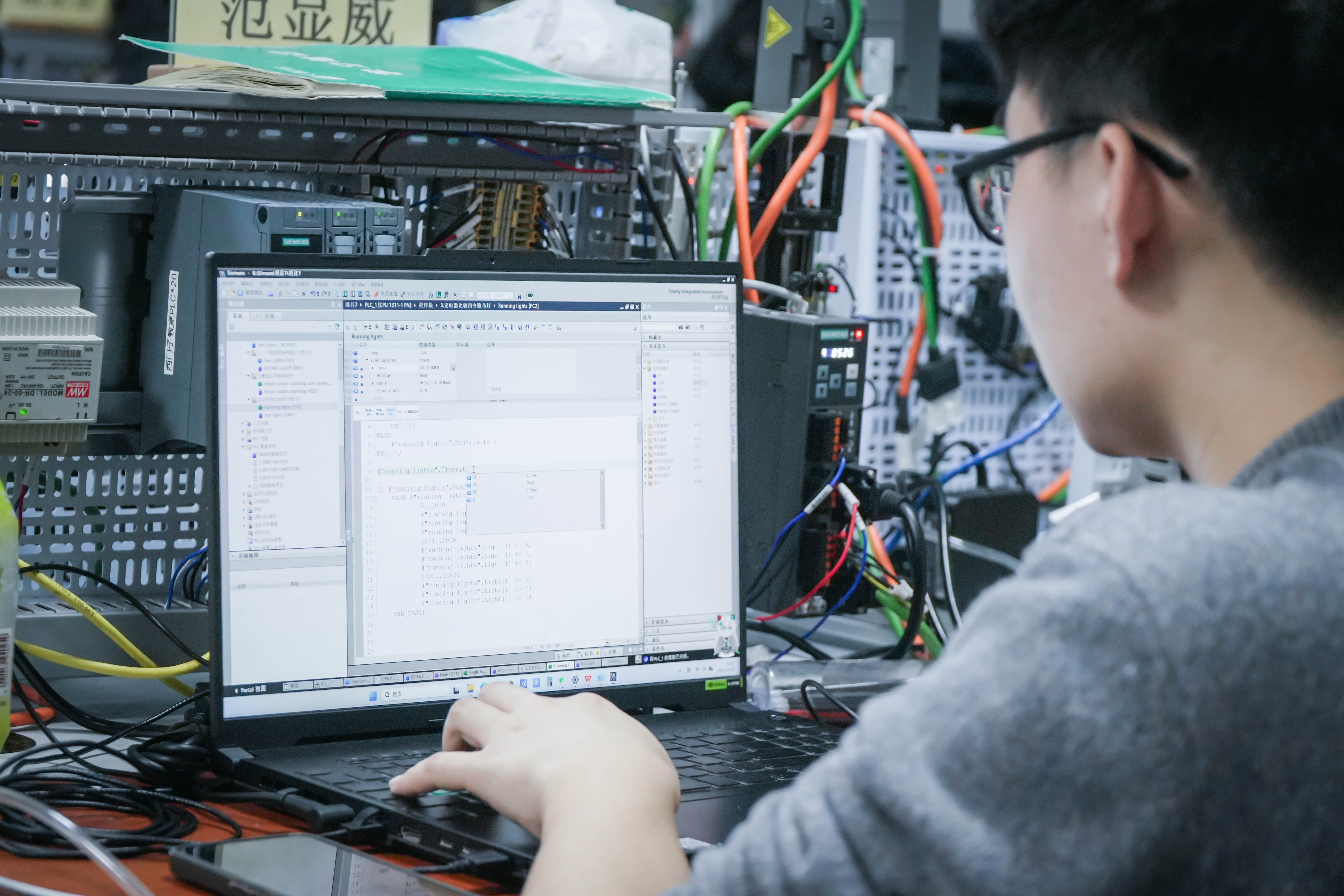
快捷编程则更侧重于软件层面的优化。通过开发智能化的编程软件,集成常用的运动指令库、工艺包(如焊接、打磨、喷涂专用模块),用户只需通过简单的图形化界面选择工艺类型、输入关键参数(如速度、力度、加工路径点),系统即可自动生成底层的机器人控制代码。这种“所见即所得”的编程模式,配合云端工艺数据库的共享,使得机器人程序的开发时间从数天缩短至数小时甚至分钟级。
除了易用性,文章还指出运动标定与误差补偿技术对于提高机器人绝对定位精度至关重要。由于制造误差、装配误差以及负载变形等因素,机器人的重复定位精度虽高,但绝对精度往往难以满足精密装配或加工的需求。通过激光跟踪仪等高精度测量设备对机器人进行全空间误差测量,并利用数学模型进行补偿,可以显著提升其在实际作业中的精度表现。同时,力-运动混合控制技术使得机器人能够像人手一样具备“触觉”,在打磨、抛光、装配等接触式作业中,根据力的反馈实时调整运动轨迹,避免刚性冲击,保证工艺质量。
综上所述,直觉示教、快捷编程、高精度标定以及力控技术共同构成了工业机器人运用技术的核心。这些技术的成熟与应用,将有效降低工业机器人的使用门槛,加速其在中小企业中的普及,是推动我国制造业向智能化升级的重要技术支撑。
有需求、疑问请联系郭校长
邮箱:rencai.guuo@plcwb.com
手机:13451558765