随着家电行业向多品种、小批量的柔性制造模式转型,传统刚性自动化产线已难以快速响应市场需求的变化。协作机器人凭借其安全灵活、部署便捷、编程门槛低的优势,正在家电制造领域加速渗透,成为实现柔性化升级的关键装备。
一、家电制造产线面临的典型挑战
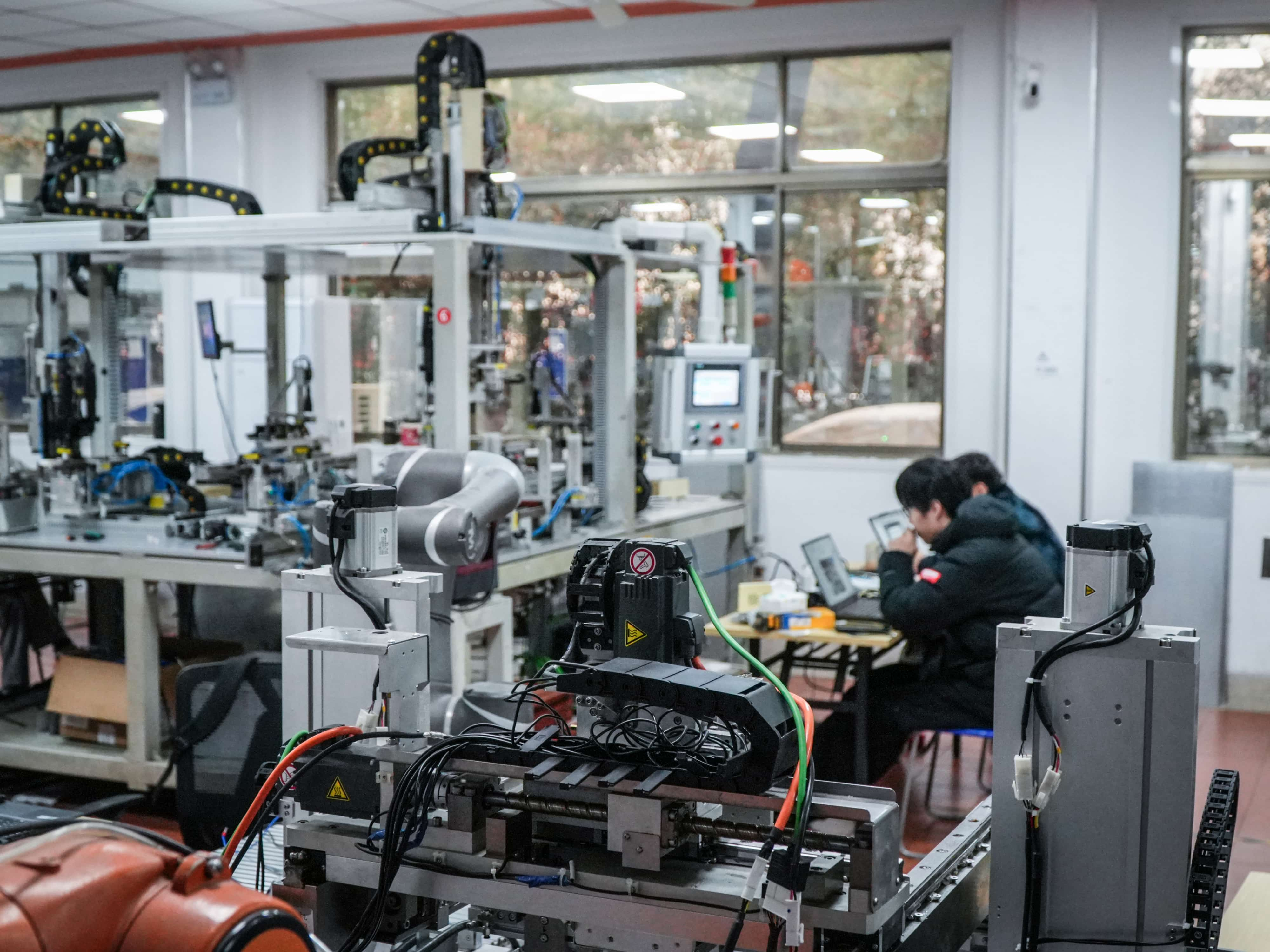
家电产品(空调、冰箱、洗衣机、微波炉等)的生产流程涉及钣金冲压、注塑成型、表面喷涂、零部件装配、功能检测等多个工序。传统产线大量依赖专机设备和人工操作,存在三个突出问题:其一,换型时间长,一台专机从生产A型号切换到B型号往往需要数小时甚至数天的机械调整;其二,人工操作质量波动大,尤其在高温喷涂车间和重体力搬运岗位,工人疲劳导致的瑕疵率居高不下;其三,招工难问题日益严峻,年轻劳动力不愿意从事重复性体力劳动。
协作机器人的出现为解决上述痛点提供了新思路。与传统工业机器人不同,协作机器人无需安全围栏即可与人近距离协同工作,且具备拖动示教功能,换型编程时间可缩短至数十分钟。
二、典型应用场景分析
在空调外机装配线上,协作机器人可执行冷凝器螺丝锁付和密封条压装等精细作业。以6轴协作机械臂搭配智能螺丝枪为例,通过力矩反馈控制技术,每个螺丝的锁紧力矩实时上传至MES系统,实现100%过程追溯。与传统气动螺丝刀人工操作相比,力矩合格率从85%提升至99.5%,且每台外机的装配节拍稳定在28秒。
在洗衣机内筒搬运工位,负载10kg以上的协作机器人可替代人工完成内筒从注塑机取件到装配线的转运。配合2D视觉定位系统,机器人能自动识别注塑机开模后的工件姿态,自适应抓取角度,无需为不同型号的内筒设置不同的取件程序。该方案使单工位操作人员从2人减少为0.5人(一人看管两台机器人),年节省人力成本约12万元。
在微波炉功能检测环节,协作机器人集成RF测试探头,按照预设轨迹对炉腔内多点进行微波泄漏检测。机器人动作的重复定位精度保证了每次检测位置的一致性,消除了人工手持探头检测的位置偏差,使检测数据的可信度显著提升。
三、系统集成关键点
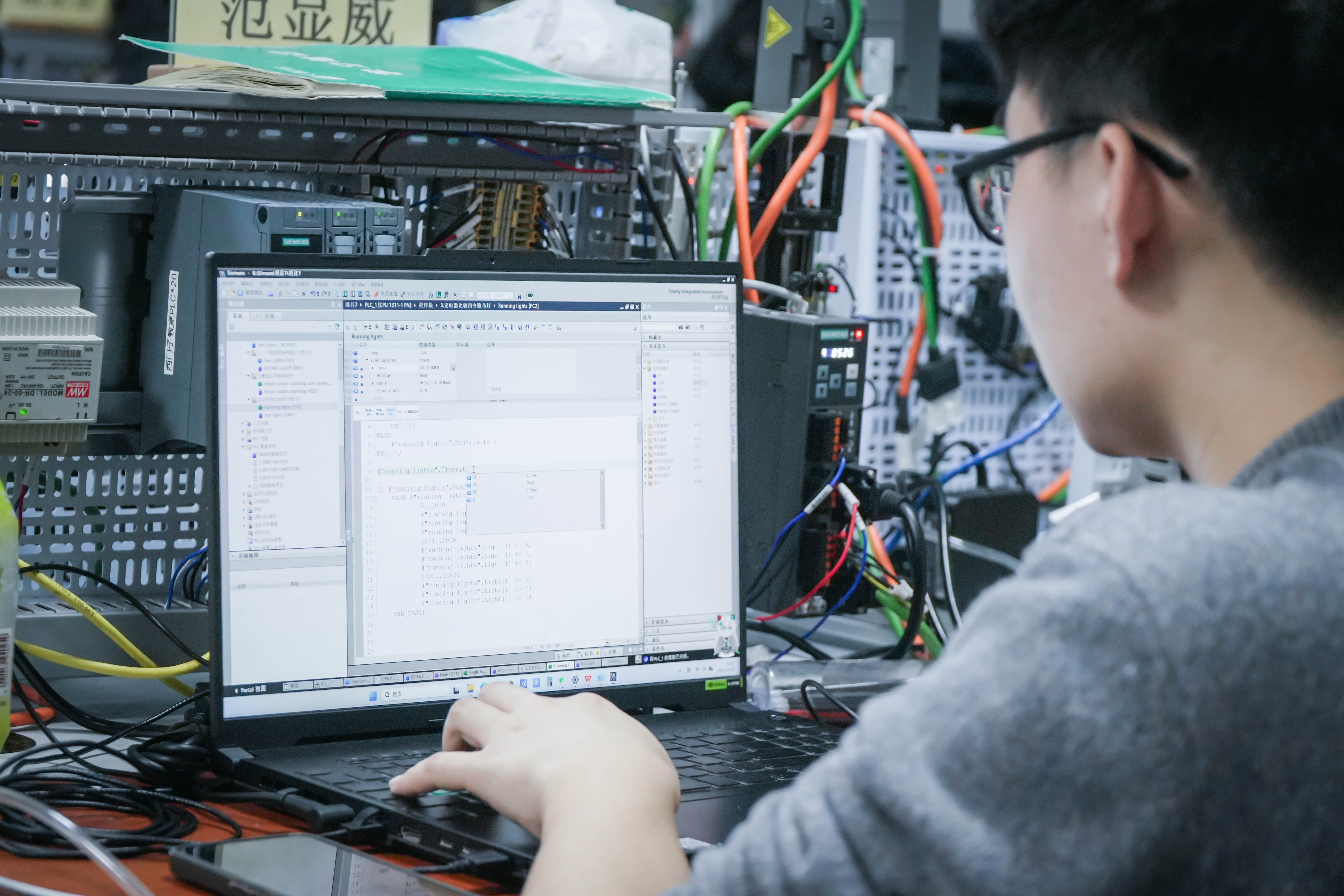
协作机器人在家电产线的成功落地,离不开上下游设备的系统化集成。首先,PLC与协作机器人的通信方式需要合理选择。对于西门子PLC,推荐使用PROFINET协议直接与机器人控制器通信,通过标准IO数据块交换启停、状态和故障信号。对于非实时性要求更高的数据(如生产工艺参数下发),可使用TCP/IP Socket通信。
其次,末端执行器的快换系统是适应多品种生产的关键。通过在机器人手腕安装工具快换盘,配合工具架上预置的多套夹具(吸盘、气爪、螺丝枪等),机器人可在生产节拍内自动切换末端工具,实现同一工位多工序作业。
再次,安全区域的合理划分不可忽视。虽然协作机器人本体具备碰撞检测和力限制功能,但在高速运动区域和锐利工具场景仍需设置激光扫描器划定安全区域。当人员进入减速区时,机器人自动降速至安全速度(≤250mm/s);进入停止区则立即制动。这种分级安全策略兼顾了效率与人机协作的安全性。
四、效率优化方法论
部署协作机器人后,持续优化生产节拍是提升投资回报率的关键。一个有效的方法是"机器人等待时间分析":通过采集机器人控制器日志,统计各工序的机器人空闲时间占比,识别瓶颈工序。常见瓶颈包括前道来料不及时、视觉识别耗时长、PLC握手信号延迟等,逐项优化可提升整体效率15%至30%。
另一个值得关注的优化方向是离线编程与仿真。在引入新产品型号时,使用机器人离线编程软件(如RoboDK、Visual Components)在虚拟环境中完成轨迹规划、碰撞检测和节拍估算,可大幅减少现场调试时间,加速产线换型。
从投资回报角度看,一台中等负载协作机器人在家电产线的平均投资回收期约为12至18个月。随着国产协作机器人品牌的崛起,硬件成本持续下降,这一周期还有进一步缩短的趋势,使得协作机器人在家电制造中的应用前景更加广阔。