资讯详情
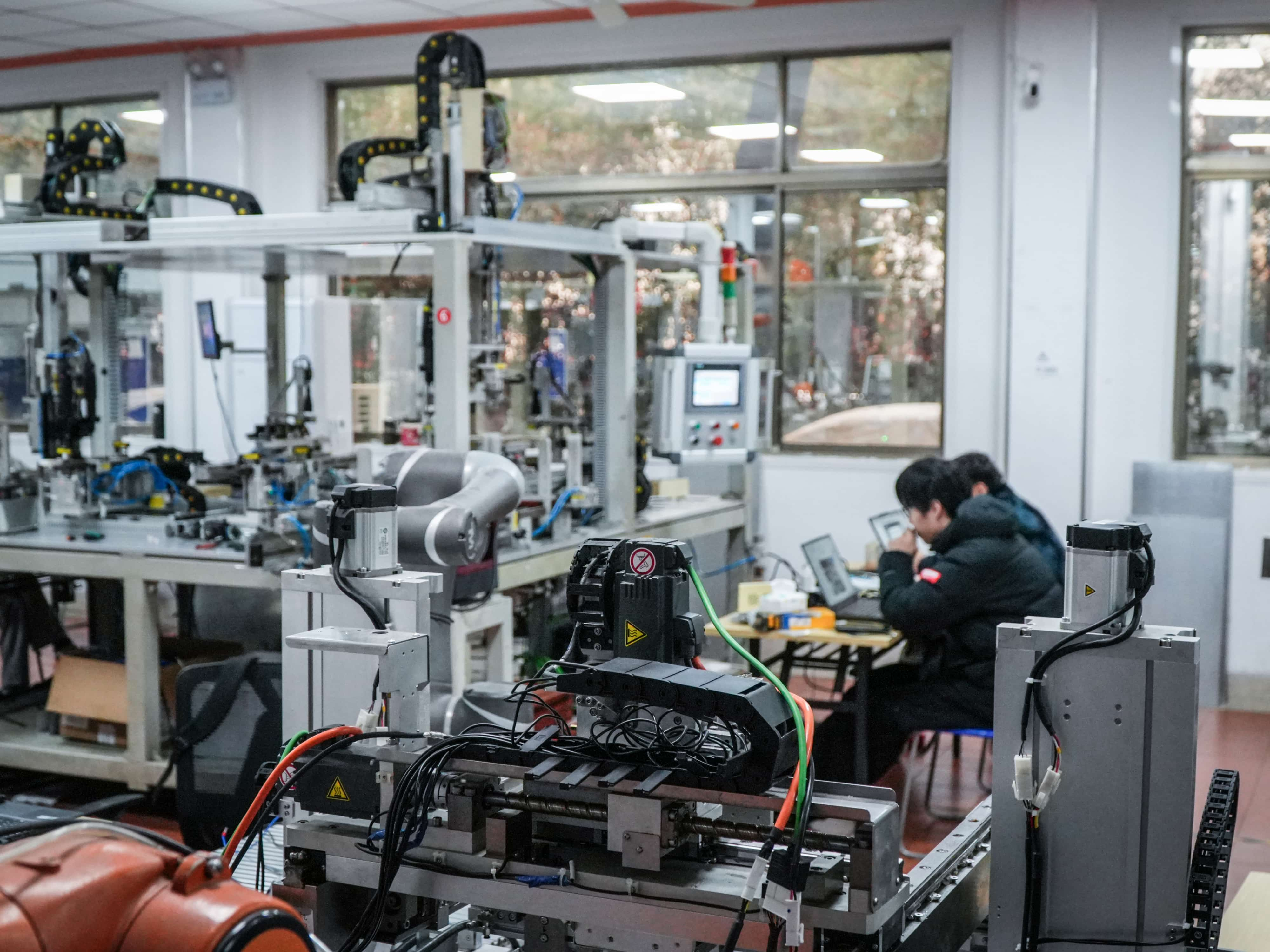
工业机器人已经成为智能制造的标配,但要真正实现高效、柔性、智能的自动化生产,仍然面临着不少技术挑战。从感知到控制,从编程到集成,每个环节都有需要突破的难点。
感知能力不足是机器人应用的首要瓶颈。传统的工业机器人只能按照预先编好的路径重复运动,对环境变化的适应能力很差。如果工件位置有偏差,或者来料不一致,机器人就可能操作失败。这也是为什么很多自动化生产线需要高精度的定位工装,增加了成本和复杂度。视觉技术的引入正在改善这一状况,2D视觉可以实现平面定位,3D视觉则能够获取深度信息,适应更复杂的场景。但视觉系统的精度、速度、抗干扰能力仍然有提升空间,特别是在复杂光照、反光、遮挡等条件下,稳定可靠的视觉检测仍然是技术难点。
柔性控制是机器人应用的另一大挑战。很多工艺操作,如装配、打磨、抛光等,不仅需要精确的位置控制,还需要控制作用力的大小。硬邦邦的位置控制很容易造成工件或工具的损坏。力控技术就是为了解决这个问题,通过力传感器实时检测接触力,调整机器人的运动轨迹和力度,实现柔顺控制。力位混合控制技术能够在某些方向上控制位置,某些方向上控制力度,很好地满足了装配、打磨等工艺的需求。但力控技术对算法要求很高,参数整定也比较复杂,需要经验丰富的工程师来调试。
系统集成的复杂性制约着机器人的应用效率。一个机器人工作站往往不是只有机器人本体,还包括视觉系统、传送带、夹具、安全围栏、PLC控制系统等多个设备。这些设备来自不同的厂商,通信协议各不相同,要让它们协同工作,需要大量的集成调试工作。标准化的工业通信协议如Profinet、EtherCAT等正在改善这一状况,但不同设备之间的兼容性问题仍然存在。而且,集成工作不仅是硬件连接,更重要的是逻辑协调,如何让各个设备按照最优的时序配合,提高整体节拍,这需要丰富的工程经验。
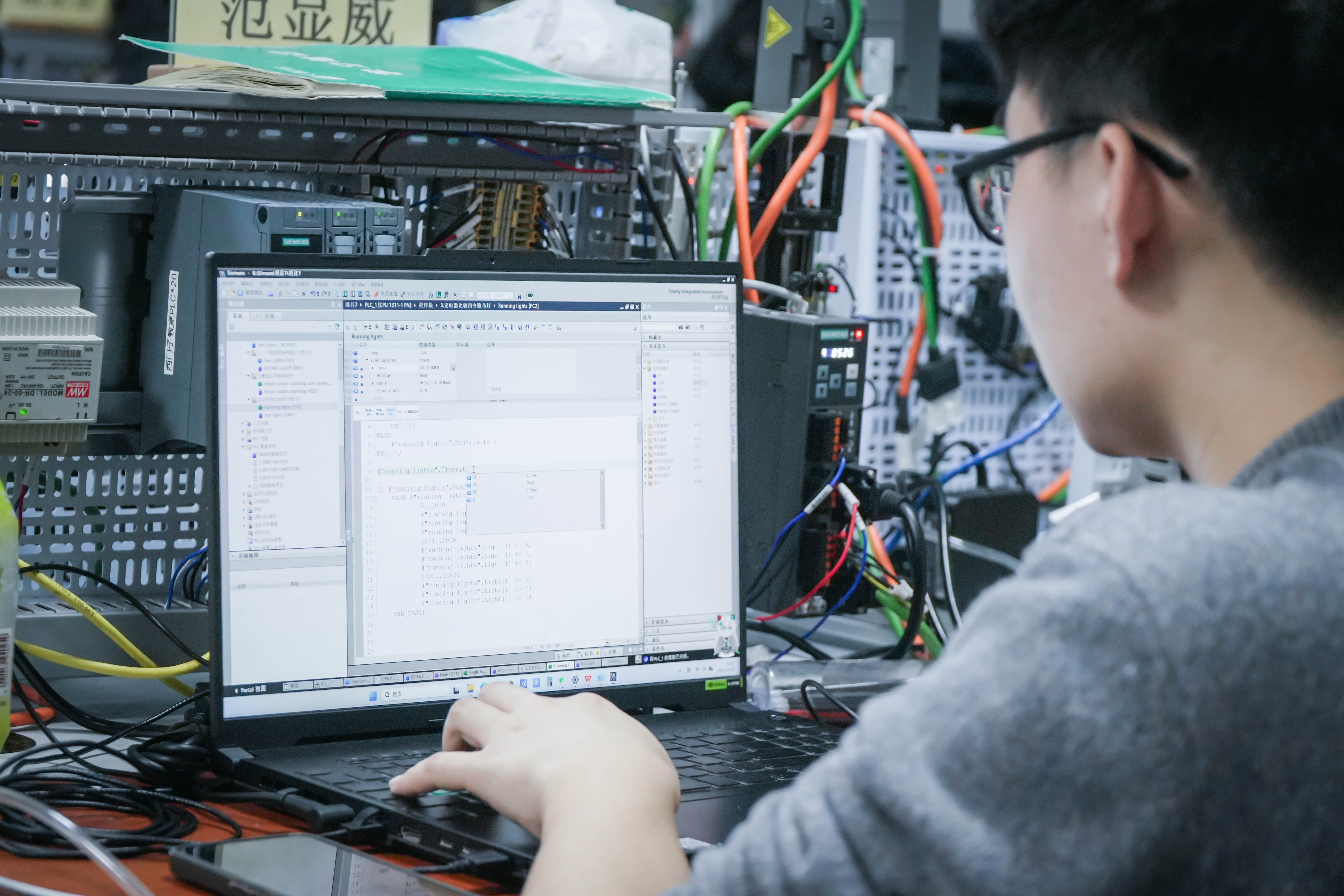
离线编程技术正在提高机器人的编程效率。传统的示教编程方式需要操作人员拿着示教器一点点教位置,效率很低,而且占用设备生产时间。离线编程则是在计算机软件中完成机器人的路径规划和程序编写,然后下载到机器人上执行。这样不仅不占用生产时间,还能够利用软件的自动路径规划功能,优化运动轨迹,提高效率。对于复杂的打磨、焊接等工艺,离线编程的优势更加明显。但离线编程也面临精度问题,虚拟环境和真实设备之间的误差需要通过标定来补偿。
数字孪生技术为机器人系统的优化提供了新手段。数字孪生就是在虚拟世界中构建一个与物理实体完全一致的数字模型,真实设备的运行状态实时映射到虚拟模型中。通过数字孪生,可以在虚拟环境中进行产线布局优化、节拍分析、故障模拟等,提前发现问题,优化方案。还可以利用数字孪生进行人员培训,在虚拟环境中练习操作和编程,既安全又高效。数字孪生是未来智能制造的重要发展方向。
机器人技术的发展是一个不断突破挑战的过程。随着视觉、力控、AI、数字孪生等技术的融入,工业机器人正在变得越来越智能、越来越柔性。这些技术的成熟和普及,将推动机器人在更多行业、更多场景中得到应用,助力智能制造向更高水平发展。
工业机器人培训、PLC编程学习,欢迎咨询交流。