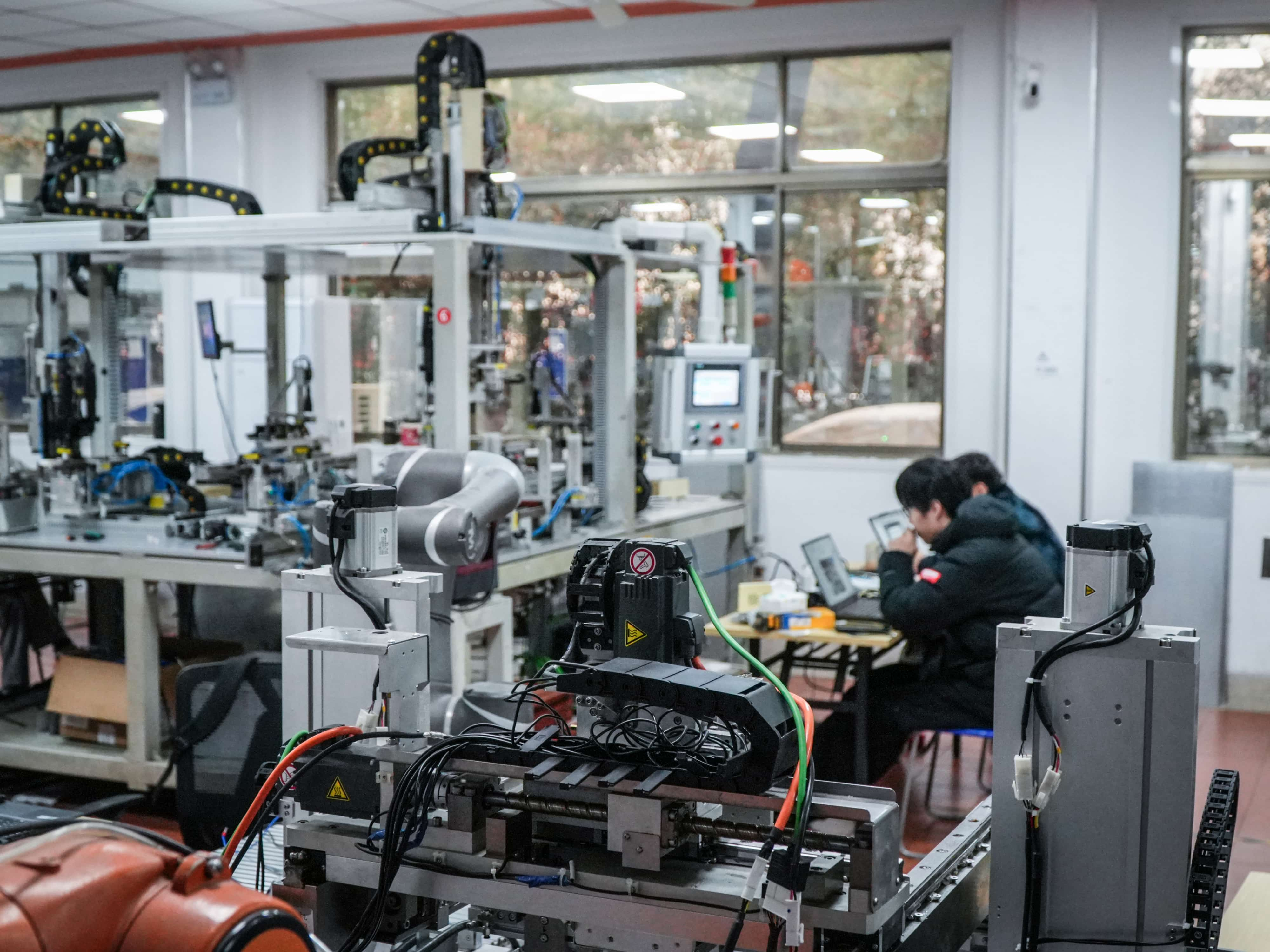
3C 电子制造业多品种、小批量、高速节拍生产需求,对搬运工业机器人产线集成精度、运行速度、换型灵活性要求极高,传统机器人单机作业无法适配流水线联动,存在空行程冗余、节拍拥堵、换型周期长等问题。本文基于消费电子零部件上下料真实产线案例,详解六轴搬运机器人整线集成方案、路径轨迹优化、流水线同步适配与全局生产节拍提升技术。
产线整体集成布局划分上料区、机器人作业区、检测工位、出料回流区,机器人居中布局覆盖全工位取放范围,搭配视觉定位模块补偿工件位置偏差,解决流水线物料偏移抓取误差问题。机器人运动路径采用最短轨迹规划,精简转弯点位,优化加减速参数,减少空走耗时,区分抓取、放置精准点位,规避无效摆动动作。
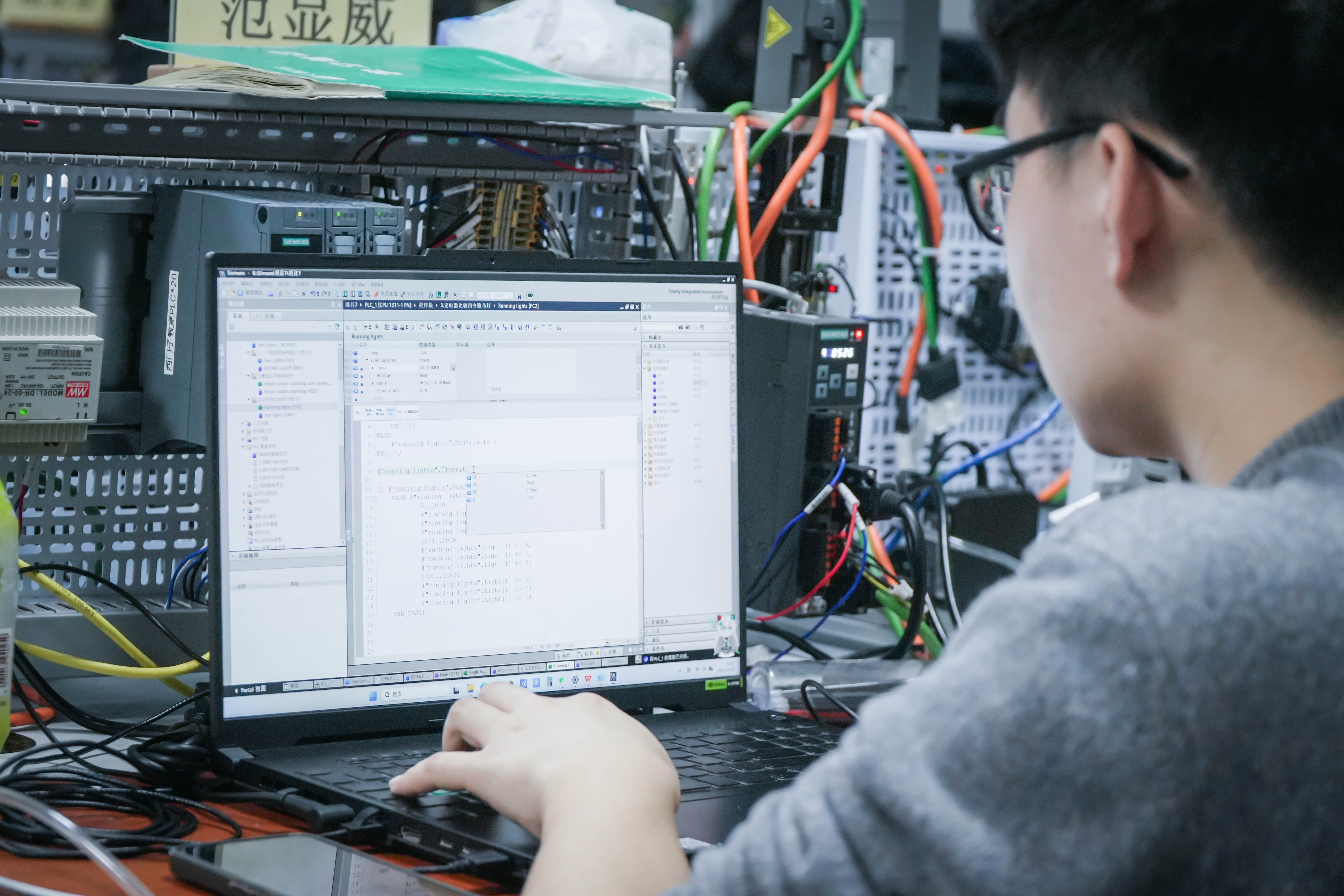
针对产线节拍瓶颈优化,分析流水线速度与机器人动作匹配关系,调整各工位时序衔接,消除等待冗余时间,同步联动 PLC 流水线启停逻辑,实现物料流转无缝衔接。柔性换型适配设计,内置多套工件抓取参数库,切换产品时调用对应轨迹程序,无需重新示教,换型时间从传统数小时压缩至十分钟内。
结合现场实测数据,优化后单循环作业时间缩短 22%,设备连续运行稳定性提升,7×24 小时不间断作业无故障,良品抓取成功率稳定 99.8%。同时讲解产线安全防护集成、异常停机机制、设备维护要点,适配 3C 行业精密自动化产线升级改造,为同类集成项目提供可直接复用的效率优化模型。