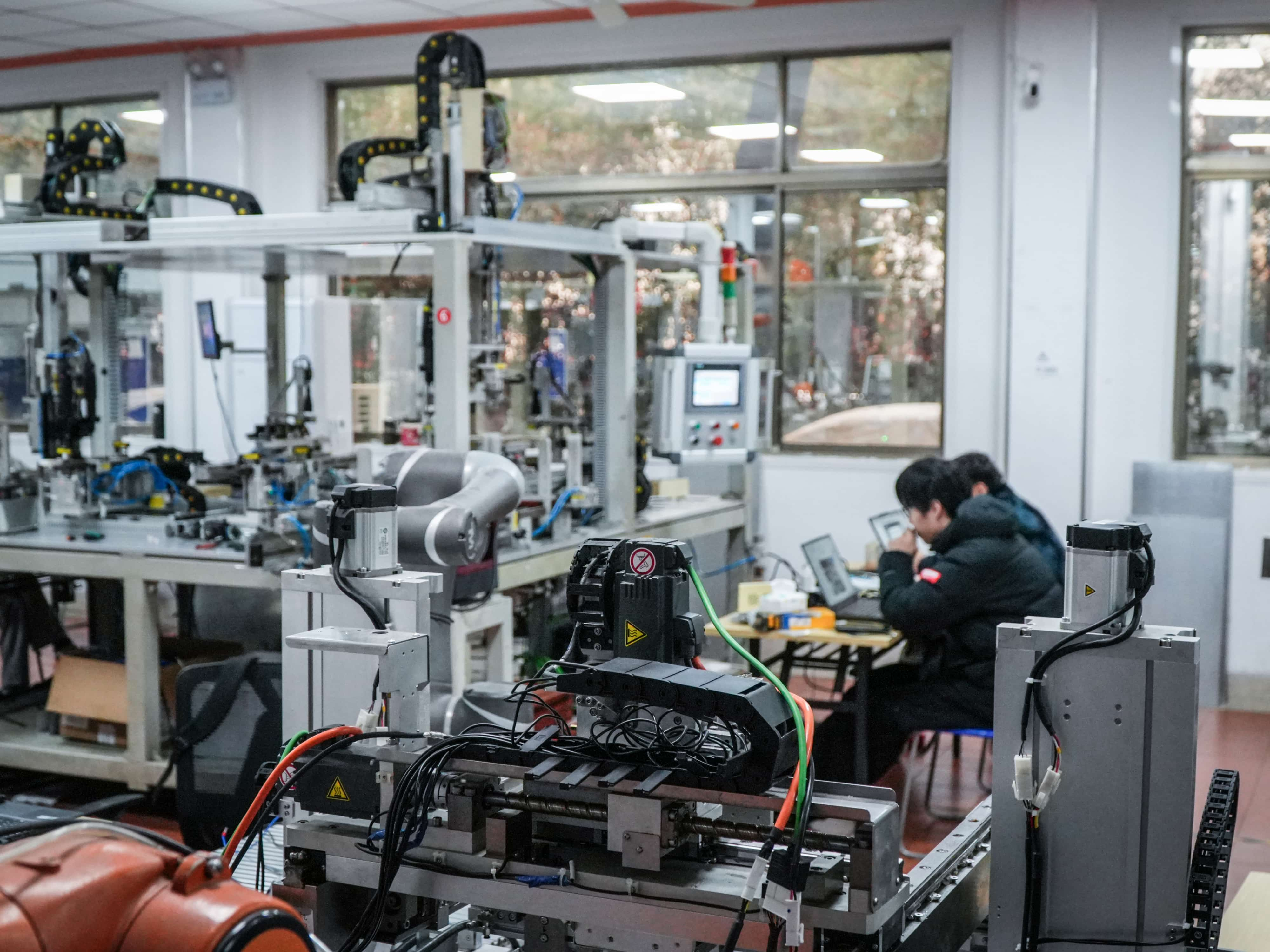
焊接工业机器人工作站是汽车零部件、钢结构制造主流自动化单元,传统现场示教调试耗时长、易碰撞治具、轨迹返工率高,基于 RobotStudio 软件离线虚拟仿真可提前完成全流程验证,再对接 PLC 实现整机联动控制,大幅缩短现场上机调试周期。本文完整拆解焊接机器人工作站从模型搭建、离线编程、坐标标定、信号配置到西门子 PLC 集成通讯的全套实操技术,适配工程现场落地应用。
首先完成工作站三维模型搭建,导入 IRB2600 焊接机器人本体、焊枪夹具、工装治具、安全围栏、输送线模型,按照现场真实尺寸 1:1 布局摆放,规划机器人运动工作范围,提前规避机械干涉空间。工件坐标系采用三点标定法,确定工件基准原点,工具坐标系标定焊枪中心点,保证仿真轨迹点位与实体机器人完全对应,这是虚拟轨迹无缝迁移现场的核心前提。
轨迹编程区分 MoveJ 关节运动、MoveL 直线焊接运动,针对焊缝路径分段示教,设置焊接起弧、收弧延时、焊接速度参数,软件内置碰撞检测功能,全程运行仿真排查姿态奇异点、边界干涉风险,优化空走轨迹,精简无效动作,压缩单循环作业节拍。同时配置机器人 IO 信号,包含焊接启停、气体开关、故障报警、安全复位数字信号。
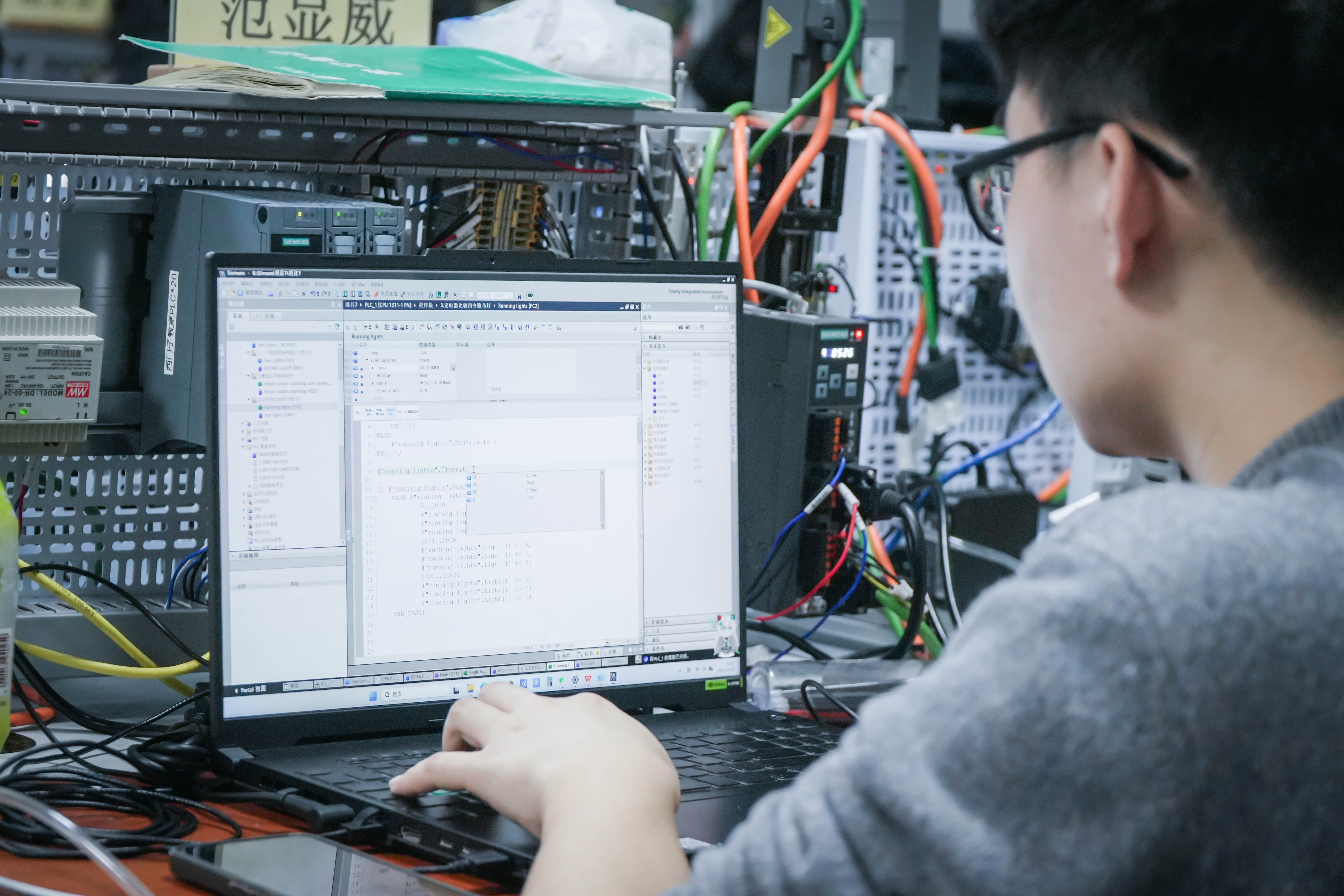
PLC 集成通讯为核心环节,搭建博途 TIA Portal 与 RobotStudio 虚拟以太网通讯链路,通过 RSConnect 组件建立信号映射,PLC 输出指令控制机器人启停、模式切换,机器人反馈运行状态、焊接完成、故障信号至 PLC,实现产线逻辑联动。完成虚拟联调后,一键导出 RAPID 程序至实体机器人,现场仅需少量微调即可运行。
文末总结工作站安全设计规范、急停回路配置、现场调试排障要点,包含轨迹偏移、信号无响应、焊接缺陷适配优化方案,整套技术完全贴合非标集成商工作站开发流程,兼顾仿真效率与现场实用性。