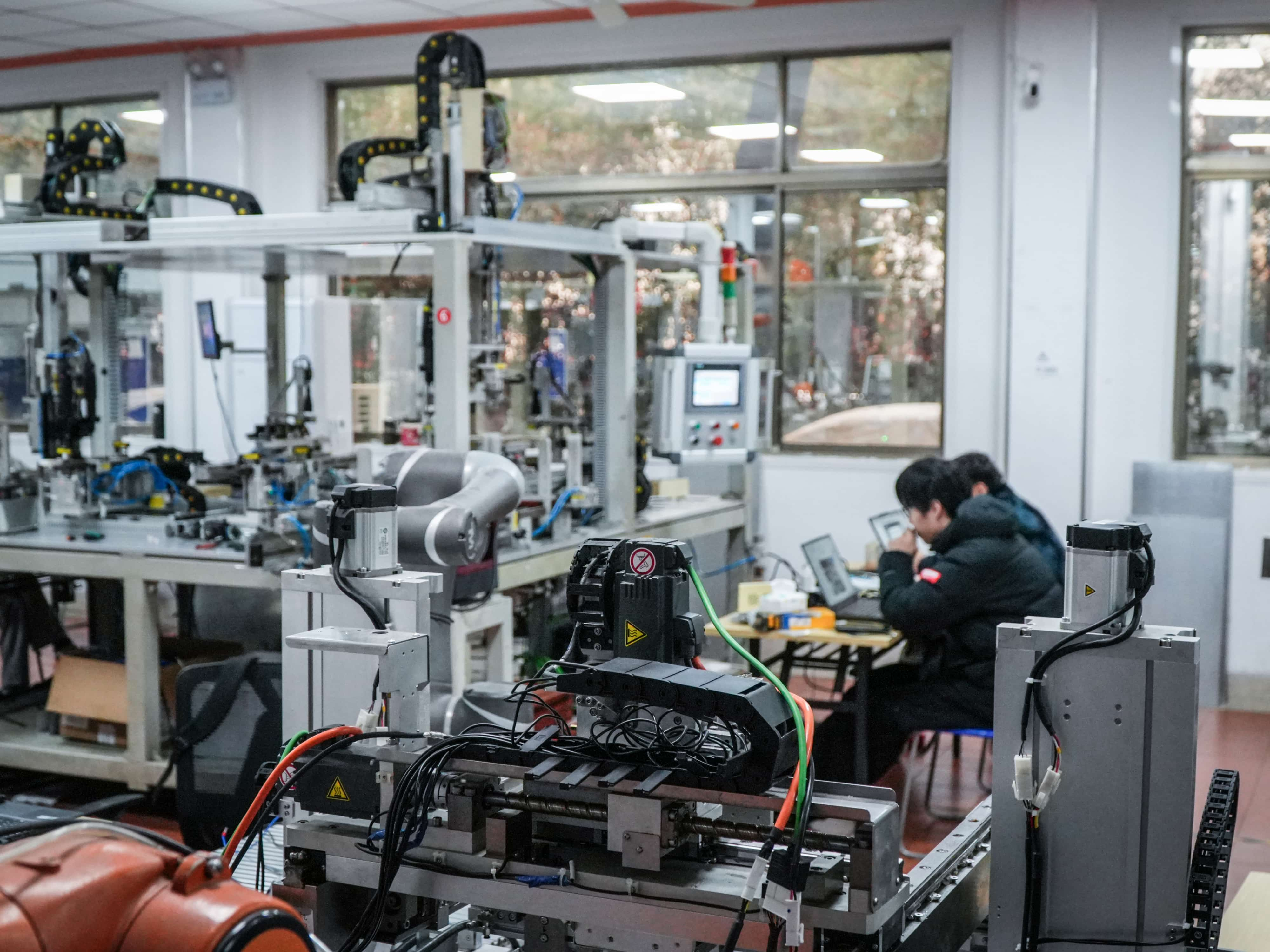
基于 EtherCAT 总线的多轴运动控制系统是高端非标自动化核心方案,依托总线分布式时钟实现多轴高精度同步,但轴数增加后易出现总线周期超限、同步偏差、轨迹卡顿、调度延迟等问题,尤其 16 轴以上大规模系统,底层调度算法直接决定运动精度。本文基于树莓派 CM5+CODESYS 平台 32 轴实测系统,拆解 EtherCAT 多轴实时调度机制、总线周期优化、轨迹规划、同步校准全套技术方案。
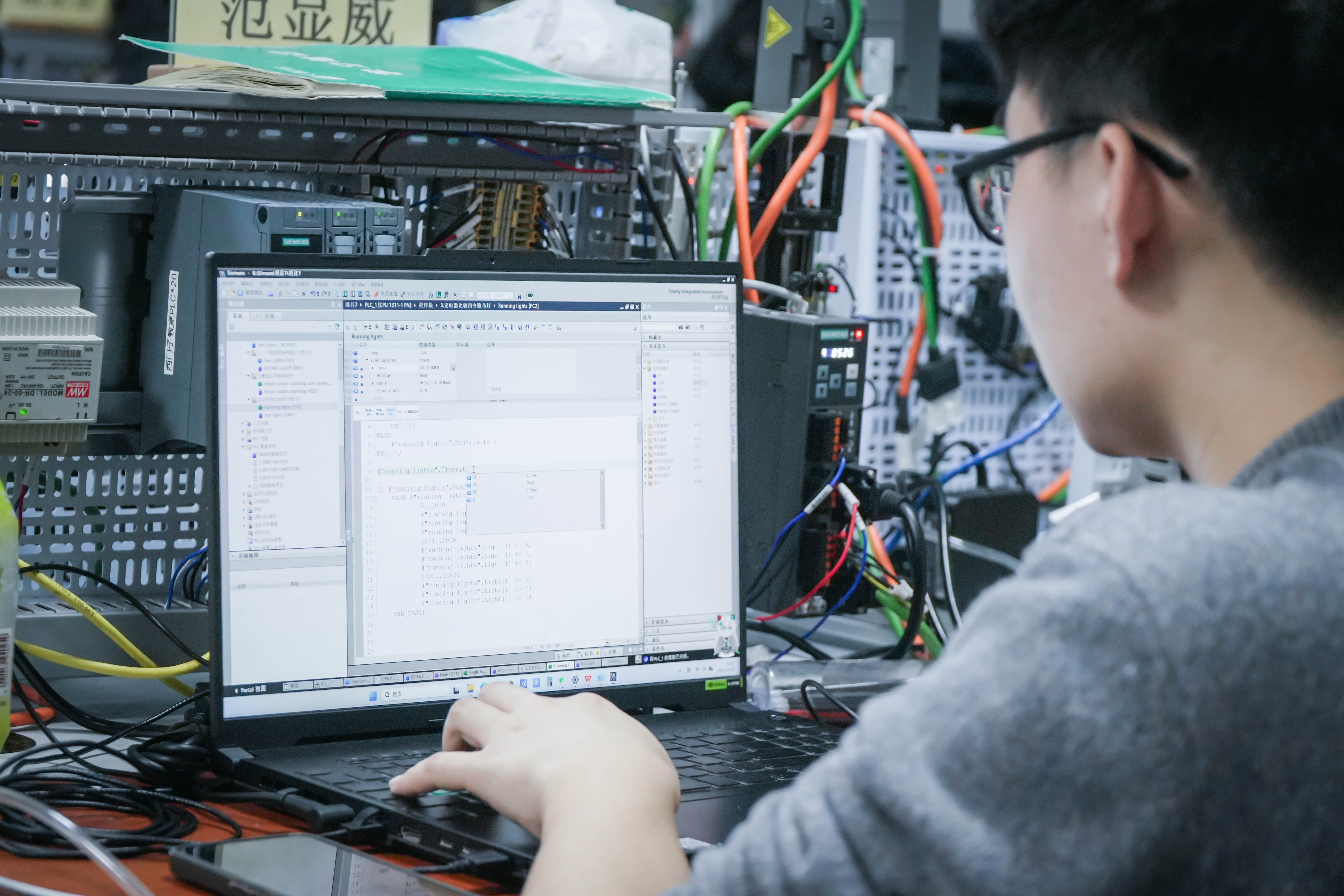
EtherCAT 多轴控制核心为分布式时钟 DC 同步,所有伺服轴统一系统时钟,消除各轴传输延迟偏差,总线周期最低可达 100μs,满足高速联动需求。系统调度分为主站任务调度、总线帧调度、轴运动任务三层,主站内核实时化优化是基础,通过系统内核裁剪、实时补丁、CPU 核心独占绑定,剥离非实时后台进程,降低任务调度延迟。
加减速轨迹统一规划采用 S 型曲线,替代梯形加减速,消除启停冲击,多轴联动时同步规划插补轨迹,保证各轴速度、位置严格耦合。总线帧结构优化,精简冗余数据,仅保留运动控制过程数据,最大化带宽利用率,100Mbps 总线环境下 32 轴满负载运行无丢帧、无周期溢出。
针对同步偏差故障,校准各轴时钟偏移补偿值,优化帧转发时序,预留带宽冗余应对突发点位数据。现场调试区分空载同步校验、负载轨迹校验、连续运行稳定性测试三步,逐步优化位置环参数,规避轴间干涉、轨迹过冲问题。实测系统实现 1ms 总线周期、32 轴伺服稳定联动,点位同步精度达标,适配精密组装、印刷、锂电卷绕等高阶运动控制场景,总结大规模总线系统布线、接地、电磁干扰规避要点。